Aug 2025 – Dec 2025
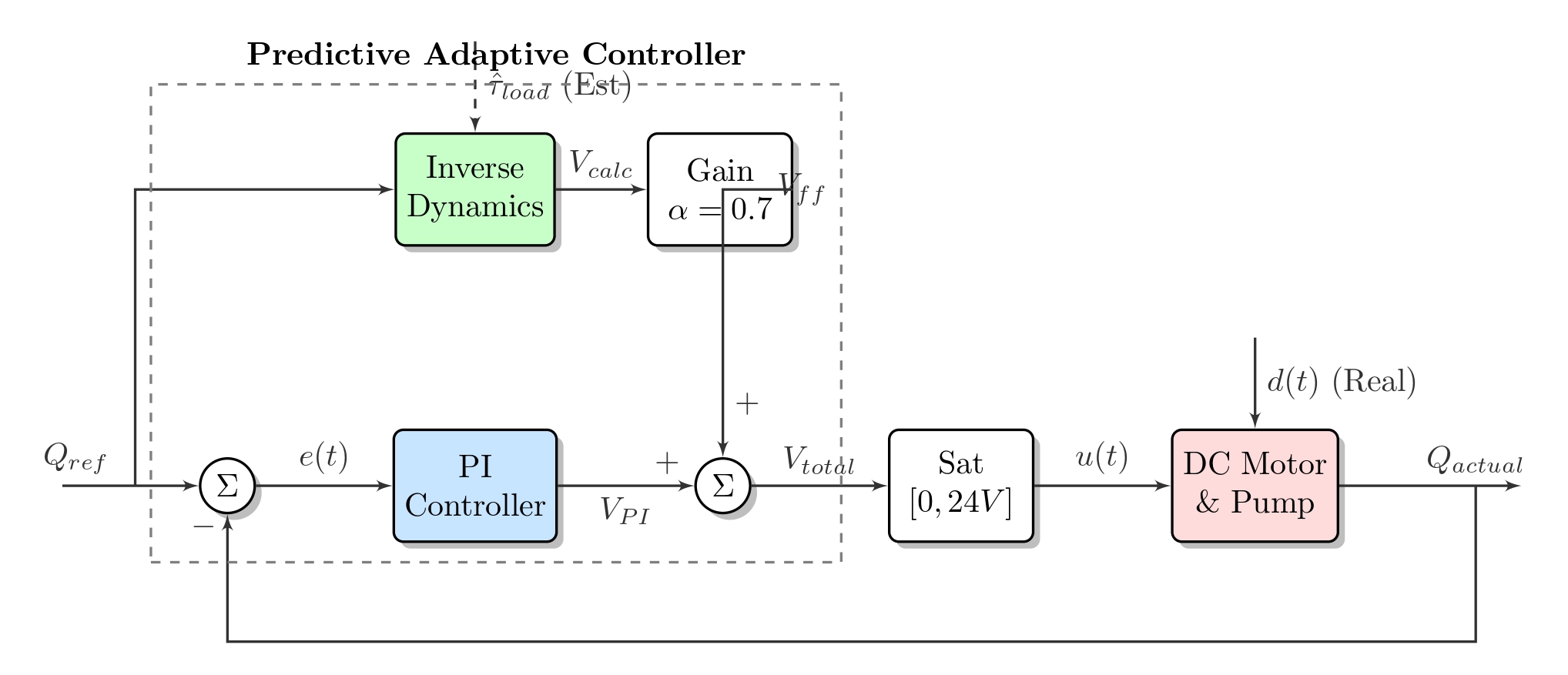
PAPI Controller: Solar Irrigation System
Designed a Two-Degree-of-Freedom (2-DOF) hybrid controller for solar pumps using MATLAB. Implemented physics-based inverse dynamics to achieve a 60% faster rise time and instant disturbance rejection.
MATLAB and Simulink
Control Theory
PID